精密定位与地学应用课题组










【2025】Comparison of PPP-RTK performance under different regional ionospheric models.
Establishing a regional ionospheric model to provide precise ionospheric products is a prerequisite for rapid real-time kinematic precise point positioning (PPP-RTK). Thus, a stochastic model for these real-time ionospheric products is also crucial. In this study, we use a Wuhan regional network (average inter-station distance of about 30 km) to comparatively analyze four regional ionospheric modeling methods with commonly-used stochastic models: the inverse distance weighting model (IDW), the quasi-four-dimension ionospheric modeling (Q4DIM), the first-order polynomial function model with internal validation (POLY), and the first-order polynomial function model with external validation (POLY-EV). Our results show that, the POLY/POLY-EV model has the smallest ionospheric delay interpolation root mean square (RMS) error, regardless of whether for inside or peripheral stations of the regional network, during both quiet and active ionospheric conditions. For 4024 and 4314 one-hour samples, the PPP-RTK results show that at inside stations, all four models converge to a horizontal precision of 10 cm within two epochs, with the POLY-EV model having the highest horizontal positioning precision (a mean RMS of 0.83 cm). At the peripheral station, PPP-RTK with the POLY/POLY-EV model achieves a horizontal precision of 10 cm within two epochs, while the IDW and Q4DIM models need 4 and 43 epochs, respectively. The horizontal positioning precision of PPP-RTK using the POLY-EV model is the highest, with a mean RMS of 1.59 cm.引用格式如下:Comparison of PPP-RTK performance under different regional ionospheric models
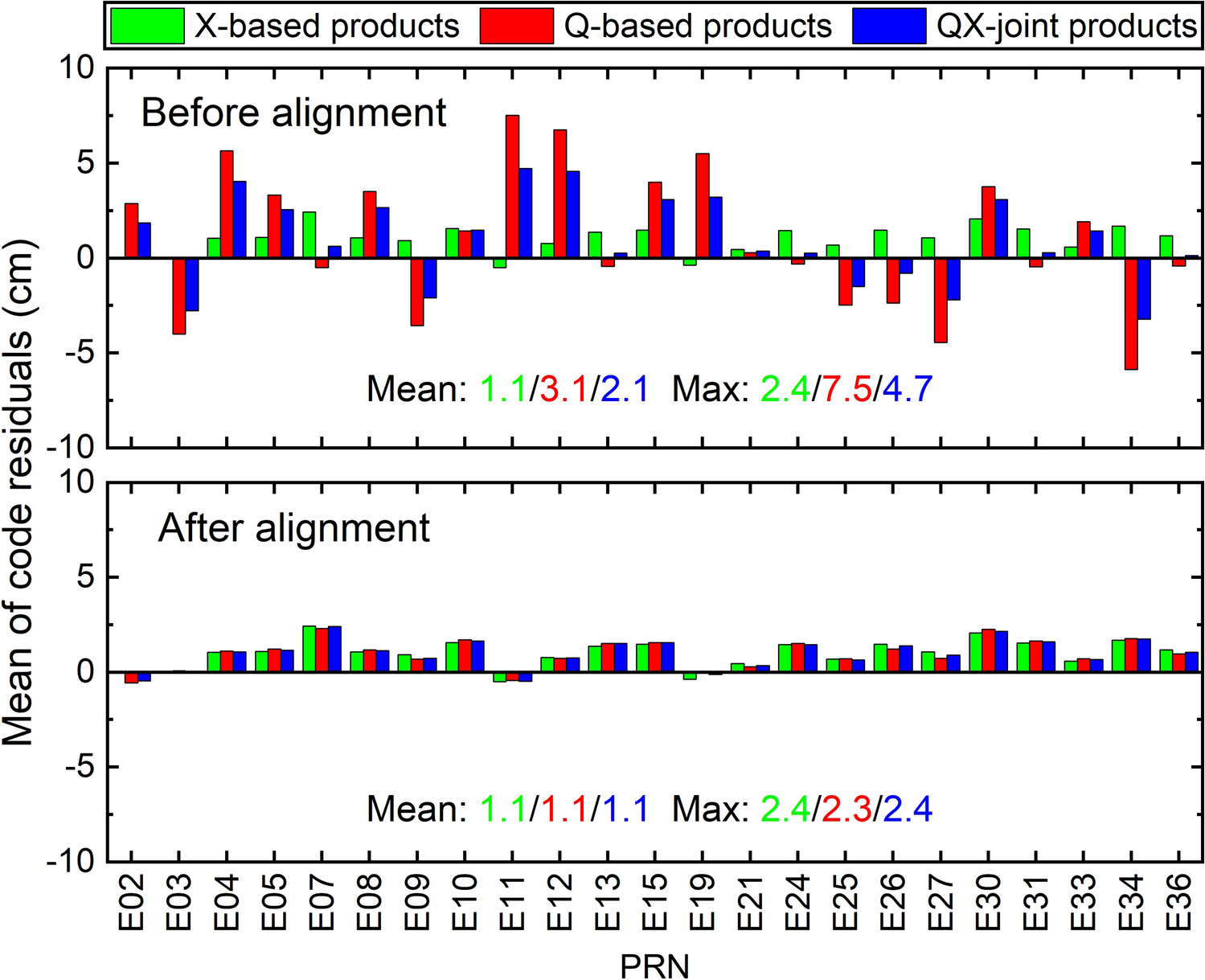
【2025】Aligning the Galileo code biases on the pilot and mixed signal channels to improve precise point positioning.
Galileo satellites modulate pseudorandom code series for both the pilot (Q) and mixed (X) channels, which however undergo separate demodulation processes by different GNSS receivers (e.g., Septentrio receivers accept the pilot channel only whereas Javad the mixed channel only). It is usually assumed that the Galileo code biases on both channels are close to each other, and then all Galileo stations can be safely used to estimate satellite clock offsets and code/phase biases, regardless of their demodulation channels. In this study, we aligned the code biases on the pilot and mixed channels by estimating intra-frequency differential code biases (DCB), and examined whether this alignment could improve the performance of precise point positioning (PPP). We performed a series of satellite clock offset estimations, phase bias estimations and PPP assessments for Galileo using data from 230 stations from days 300 to 365 in 2023. Our analysis uncovered that the ignored DCBs could introduce systematic biases of up to 0.1 m in satellite clock offsets and up to 0.49 cycles in satellite phase biases. Using the aligned code bias products, the unified satellite clock offsets and phase biases across pilot and mixed channels can be estimated. The differences of pilot and mixed satellite clock offsets were reduced to within 0.03 m, while the UPD differences were reduced to an average of 0.02 cycles. With these modified precise products, the static PPP-AR wide-lane ambiguity fixing rates increased from 79.28% to 96.81%, and the maximum code residuals decreased from up to 7.5 to 2.3 cm. The convergence time of the kinematic PPP-AR decreased by an average of 23%. Therefore, aligning the Galileo code biases on the pilot and mixed channel signals to generate unified precision products can improve the performance of PPP-AR.引用格式如下:Zhang, Q., Geng, J., Li, G. et al. Aligning the Galileo code biases on the pilot and mixed signal channels to improve precise point positioning. GPS Solut 29, 75 (2025). https://doi.org/10.1007/s10291-025-01838-4

【2025】GSeisRT: A Continental BDS/GNSS Point Positioning Engine for Wide-Area Seismic Monitoring in Real Time.
Precise coseismic displacements in earthquake/tsunamic early warning are necessary to characterize earthquakes in real time in order to enable decision-makers to issue alerts for public safety. Real-time global navigation satellite systems (GNSSs) have been a valuable tool in monitoring seismic motions, allowing permanent displacement computation to be unambiguously achieved. As a valuable tool presented to the seismic community, the GSeisRT software developed by Wuhan University (China) can realize multi-GNSS precise point positioning with ambiguity resolution (PPP-AR) and achieve centimeter-level to sub-centimeter-level precision in real time. While the stable maintenance of a global precise point positioning (PPP) service is challenging, this software is capable of estimating satellite clocks and phase biases in real time using a regional GNSS network. This capability makes GSeisRT especially suitable for proprietary GNSS networks and, more importantly, the highest possible positioning precision and reliability can be obtained. According to real-time results from the Network of the Americas, the mean root mean square (RMS) errors of kinematic PPP-AR over a 24 h span are as low as 1.2, 1.3, and 3.0 cm in the east, north, and up components, respectively. Within the few minutes that span a typical seismic event, a horizontal displacement precision of 4 mm can be achieved. The positioning precision of the GSeisRT regional PPP/PPP-AR is 30%–40% higher than that of the global PPP/PPP-AR. Since 2019, GSeisRT has successfully recorded the static, dynamic, and peak ground displacements for the 2020 Oaxaca, Mexico moment magnitude (Mw) 7.4 event; the 2020 Lone Pine, California Mw 5.8 event; and the 2021 Qinghai, China Mw 7.3 event in real time. The resulting immediate magnitude estimates have an error of around 0.1 only. The GSeisRT software is open to the scientific community and has been applied by the China Earthquake Networks Center, the EarthScope Consortium of the United States, the National Seismological Center of Chile, Institute of Geological and Nuclear Sciences Limited (GNS Science Te P Ao) of New Zealand, and the Geospatial Information Agency of Indonesia.引用格式如下:Jianghui Geng, Kunlun Zhang, Shaoming Xin, Jiang Guo, David Mencin, Tan Wang, Sebastian Riquelme, Elisabetta D'Anastasio, Muhammad Al Kautsar, GSeisRT: A Continental BDS/GNSS Point Positioning Engine for Wide-Area Seismic Monitoring in Real Time, Engineering, Volume 47, 2025, Pages 57-69, ISSN 2095-8099, https://doi.org/10.1016/j.eng.2024.03.012.

【2025】Factor Graph-Based Tightly Coupled RTK/INS/LiDAR System With De-Drifting LiDAR Data Association in Urban Areas.
Accurate, reliable, and continuous positioning is crucial for applications like autonomous driving and mobile robots. Integrating multiple sensors, such as the global navigation satellite system (GNSS), inertial navigation system (INS), and light detection and ranging (LiDAR), in a tightly coupled manner has become a promising solution to leverage their complementary advantages. However, LiDAR pose constraints may face significant inconsistencies with GNSS absolute measurements when using the frame-to-map data association method. Alternatively, frame-to-frame LiDAR data association suffers from limited accuracy due to sparse feature point matching. This article presents a tightly coupled GNSS real-time kinematic (RTK)/INS/LiDAR positioning system based on a de-drifting LiDAR data association method. The LiDAR keyframe selection strategy is designed by accounting for the availability and reliability of both GNSS and LiDAR data. A frame-to-last-GNSS-available-frame data association method is developed, utilizing both plane and edge features to construct LiDAR relative constraints. These measurements, alongside INS data and GNSS pseudorange and carrier phase measurements, are integrated within a factor graph optimization framework for pose estimation. Experimental results from an autonomous vehicle in urban environments demonstrate that the proposed tightly coupled system significantly outperforms other integration approaches using various sensor combinations, integration types, and LiDAR data association methods, improving 3-D positioning accuracy in root mean square (rms) from 12.40 m (using GNSS RTK) to 0.20 m. Moreover, the proposed method maintains high-accuracy absolute positioning with a 3-D position error of 0.28 m and a 3-D maximum error of 0.44 m during a 20-s GNSS outage.引用格式如下:C. Wang, P. Wang, F. Wang, W. Tang and J. Geng, "Factor Graph-Based Tightly Coupled RTK/INS/LiDAR System With De-Drifting LiDAR Data Association in Urban Areas," in IEEE Sensors Journal, vol. 25, no. 9, pp. 15442-15455, 1 May1, 2025, doi: 10.1109/JSEN.2025.3546627.

全源融合导航
随着智慧交通、自动驾驶、移动测量等领域的发展,汽车、无人机、智能手机等设备对定位导航的需求越来越大,导航应用场景越来越复杂,定位精度和可靠性的要求越来越高。卫星导航系统(GNSS)能在大部分场景下能为用户提供高精度高可靠的位置信息,但是在隧道、林荫、城市峡谷、室内以及强电磁干扰等场景中,GNSS性能急剧下降,甚至无法提供或提供错误的定位信息,难以适应目前复杂多变的位置服务场景。为了获取稳健的导航性能,GNSS通常与惯性测量单元(IMU)融合形成GNSS/INS组合导航系统,应用于导航定位中。在GNSS观测较差的环境中,GNSS/INS组合导航系统的性能与IMU的级别密切相关,IMU等级越高,定位精度就越高,同时意味着系统的成本也越高;而面向大众市场的MEMS IMU,虽能在一定程度上改善GNSS的定位性能,但是依然无法稳定的提供可靠的导航定位信息。 除了GNSS与IMU以外,仍有许多可用于导航定位的传感器,如激光雷达、相机、磁力计、气压计等等,因此,为了解决GNSS固有弱点的制约,在卫星拒止环境中提供可靠的导航信息,美国国防高级研究计划局(DARPA)于2010年提出并开展全源定位与导航(All Source Position and Navigation, ASPN)的研究,即基于多源传感器,根据不断的变化的任务需求,实现快速系统重构、在线配置和即插即用的组合导航系统。2017年5月,美国空军研究实验所成功开发出ASPN系统,该系统包含GPS、IMU、相机、磁力计和气压计,目前已在海陆空等平台上完成了多次现场实验。 国内关于全源融合导航的研究起步较晚,目前仍在探索阶段。本团队正致力于全源导航的研究,我们搭建了包含GNSS、IMU、单目/双目/鱼眼相机、激光雷达等传感器的无人车实验平台,自主设计并开发了GNSS/INS/Vision紧组合定位算法软件平台,并在真实的城市街区环境中进行了硬件和软件平台的测试。在随后的研究中,我们将融合更多的传感器,并进一步优化软件平台,推动国内全源融合导航的发展。

精密单点定位模糊度固定与区域增强
精密单点定位技术(PPP)是一种经典的采用全球导航定位系统(GNSS)伪距以及载波相位观测值来进行定位的技术。由于其不需要依赖任何参考站,只需精密卫星轨道及钟差产品即可实现厘米级定位,目前被广泛应用在了实时导航服务和地学研究中。然而,受卫星几何构型以及伪距精度的影响,在初始化以及信号中断后,PPP通常需要数十分钟来收敛至可靠的厘米级结果;这一缺陷极大地限制了PPP的应用场景。另一方面,地学研究者也对目前PPP的定位精度提出了更高的要求以期发现更加微弱的地学信号。本课题组自2009年以来一直致力于PPP快速收敛以及高精度定位的研究,研究方向主要分为两个方面: 1. 精密单点定位模糊度固定(PPP-AR) 众所周知,GNSS载波相位观测值具有比伪距更高的精度,通常为毫米级,然而,未知模糊度的存在使得载波相位无法直接用于定位解算。如果我们可以获得整周模糊度的具体数值,就可以通过载波相位构建出毫米级的距离观测值,从而瞬间实现优于厘米级的可靠定位。模糊度固定方法(AR)因此成为了PPP收敛时间缓慢的突破口,众多国内外学者对其进行了深入研究。自葛茂荣教授2008年首次提出PPP-AR方法以来,本课题组已经做了大量围绕PPP-AR的具有创新性的工作:我们在2010年论证了目前主流的两种模糊度固定方法——小数偏差法(FCB)以及整数钟法(IRC)的等价性;在2012年我们进一步提出了基于GPS模糊度固网解计算小数偏差的方法,相比经典的基于浮点解计算方法具有更高的精度;提出了一种三频PPP-AR方法进一步提高传统双频方法的收敛效率;在2016年实现了不同种接收机间GLONASS小数偏差的计算;紧接着首次提出了PPP系统间模糊度固定方法并用GPS和BeiDou进行了验证;在2019年我们提出了一种全球无缝的瞬时分米级单点定位方法,主要用于解决自动驾驶等高时效性以及高精度要求的导航应用。我们将继续研究多星座多频率信号背景下PPP快速模糊度固定的方法并拓展其应用。 2. 区域参考网增强精密单点定位(PPP-RTK) 通过引入相位偏差产品我们可以实现模糊度的单站固定,然而即使使用目前所有可用的卫星,我们仍需要花费十几分钟的时间来获得正确的模糊度固定解。通过施加区域参考网电离层对流层等约束,PPP最快可以在几秒钟之内实现模糊度的可靠固定,这就是PPP-RTK技术。因此PPP-RTK可以很好的克服传统PPP收敛缓慢的问题,同时又不需要过分依赖参考站,成为了当下GNSS导航领域的研究热点。课题组早在2010年就提出了利用区域参考网电离层延迟改正信息实现PPP-AR快速重收敛的方法,并在之后一年针对实时PPP服务提出了一种PPP-RTK模型。在2017年,我们通过引入精密电离层产品约束实现了GPS和GLONASS模糊度同时固定并将实时PPP的收敛时间缩短至5分钟以内。课题组将继续研究区域增强PPP的理论与方法来满足实时GNSS导航定位的需求。相关工作1. Integer ambiguity resolution in precise point positioning: Method comparison. J. Geod (2010)2. Rapid re-convergences to ambiguity-fixed solutions in precise point positioning. J. Geod (2010)3. Improving the estimation of fractional-cycle biases for ambiguity resolution in precise point positioning. J. Geod (2012)4. Triple-frequency GPS precise point positioning with rapid ambiguity resolution. J. Geod (2013)5. GLONASS fractional-cycle bias estimation across inhomogeneous receivers for PPP ambiguity resolution. J. Geod (2016)6. Rapid initialization of real-time PPP by resolving undifferenced GPS and GLONASS ambiguities simultaneously. J. Geod (2017)7. Inter-system PPP ambiguity resolution between GPS and BeiDou for rapid initialization. J. Geod (2018)8. Toward global instantaneous decimeter-level positioning using tightly coupled multi-constellation and multi-frequency GNSS. J. Geod (2019)

地震大地测量学
传统的地震台网和大地测量台网是相互独立的区域范围内的地震观测台网。由于最初学者们对多传感器融合应用去地震学研究缺乏相关的概念,所以两种台网一般独立使用。但是地球科学家逐渐认识到,地震运动的范围很广,没有任何一种单一的传感器能够捕捉到地震学研究所感兴趣的所有信号。 强震仪和地震仪对记录高频地震信号有足够的精度,而对低频部分则精度较低。惯性传感器宽频带位移的计算存在许多已知问题,却没有公认的方法。例如,未解决的旋转运动是计算精确位移的主要障碍,因为加速度时间序列中的微小偏移会在积分过程中产生线性和二次误差。因此,随着时间的推移,位移波形将无限增长。传统的抑制发散的方法是在加速度时间序列上使用高通滤波器,但要以损失永久位移为代价。 GNSS技术能够以位移形式直接捕捉地面运动,一个新兴的领域——GNSS地震学已经引起了地球科学家的关注。GNSS技术的优点是可以恢复永久性同震位移,在大地震中不存在限幅的影响。然而,它在全频带内的噪声比惯性传感器大,这会导致高频段和小地震中的信号不准确。 因此,一些学者主张将地震仪和大地测量数据相结合,以获得最佳的宽频带位移,因为二者可以优势互补。根据这个理论,我们也做出了一些的先进的有影响力的成果。2013年,我们提出了一种紧耦合的卡尔曼滤波方法,通过GPS相位和伪距观测值及地震仪观测值在PPP-AR过程中估算同震位移和速度,并可用于预警系统;同年,我们还提出了一种如何从并置的高频GPS和加速度计数据中恢复同震地面点倾斜的方法。2017年和2018年,我们分别提出将高频GPS与GLONASS结合用于地震大地测量,将高频多系统GNSS结合用于日常的地壳变形监测,这也为我们展示了多系统GNSS在地震大地测量中的作用。2019年,我们进一步发展了多传感器融合的方法,利用并置的高频GNSS、加速度计和陀螺仪数据来获取同震位移及旋转信息。相关工作1. Six‐Degree‐of‐Freedom Broadband Seismogeodesy by Combining Collocated High‐Rate GNSS, Accelerometers, and Gyroscopes. Geophysical Research Letters (2019)2. Noise characteristics of high-rate multi-GNSS for subdaily crustal deformation monitoring. Journal of Geophysical Research (2018)3. Integrating GPS with GLONASS for highrate seismogeodesy. Geophysical Research Letters (2017)4. Recovering coseismic point ground tilts from collocated high-rate GPS and accelerometers. Geophysical Research Letters (2013)5. A new seismogeodetic approach applied to GPS and accelerometer observations of the 2012 Brawley seismic swarms: Implications for earthquake early warning. Geochemistry, Geophysics, Geosystems (2013)

基于Android原始GNSS数据的高精度定位
全球导航卫星系统(GNSS)芯片组的尺寸不断减小,成本不断降低,这使得它们能够嵌入智能手机、可穿戴设备、共享自行车和车辆等设备中。然而,大众市场芯片组只能提供2-3米的定位精度,在不利的多径条件下,定位精度会降低到10米或更差。随着2016年Android7的发布,用户可以通过应用程序级的API(应用程序编程接口)导出和使用Android智能设备中的原始GNSS测量值。这推动了使用大众化低成本Android智能设备的高精度定位的创新。尤其是在如智能物流和移动健康诊断等移动和安全相关的应用,可能会从亚米或更好的定位精度中受益。而智能手机上提供的亚分米或厘米精度将会有助于完成半专业化的测量任务,如个人或众包测图。 以此契机,我们于2018年对Nexus 9、华为Honor V8和Samsung S8等主流便携式智能设备的原始多系统GNSS信号特征和定位性能进行了综合评价,并实现了智能设备外接天线的研制。2019年,我们研究了这些智能设备的原始GNSS测量的误差特性,发现了它们载波相位观测值含有特殊的相位偏差,并提供了它们的码跟踪环路(DLL)和相位跟踪环路(PLL)热噪声模型参数。同年,我们提出了一种仅使用Android原始GNSS数据而无需外部增强校正即可实现分米级定位的Hatch滤波方法。随后,我们开发了一款具有记录Android 原始GNSS观测值、用户精密定位及地图显示、超快速星历产品内插导出等功能的应用程序“Pride-Location App”。在随后的研究中,我们将进一步讨论和研究Android原始GNSS载波相位模糊度固定等内容。相关工作1. Characteristics of raw multi-GNSS measurement error from Google Android smart devices. GPS Solutions (2019)2. An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sensing (2019)3. A Comprehensive Assessment of Raw Multi-GNSS Measurements from Mainstream Portable Smart Devices. ION GNSS+ (2018)





