精密定位与地学应用课题组







【2025】Comparison of PPP-RTK performance under different regional ionospheric models.
Establishing a regional ionospheric model to provide precise ionospheric products is a prerequisite for rapid real-time kinematic precise point positioning (PPP-RTK). Thus, a stochastic model for these real-time ionospheric products is also crucial. In this study, we use a Wuhan regional network (average inter-station distance of about 30 km) to comparatively analyze four regional ionospheric modeling methods with commonly-used stochastic models: the inverse distance weighting model (IDW), the quasi-four-dimension ionospheric modeling (Q4DIM), the first-order polynomial function model with internal validation (POLY), and the first-order polynomial function model with external validation (POLY-EV). Our results show that, the POLY/POLY-EV model has the smallest ionospheric delay interpolation root mean square (RMS) error, regardless of whether for inside or peripheral stations of the regional network, during both quiet and active ionospheric conditions. For 4024 and 4314 one-hour samples, the PPP-RTK results show that at inside stations, all four models converge to a horizontal precision of 10 cm within two epochs, with the POLY-EV model having the highest horizontal positioning precision (a mean RMS of 0.83 cm). At the peripheral station, PPP-RTK with the POLY/POLY-EV model achieves a horizontal precision of 10 cm within two epochs, while the IDW and Q4DIM models need 4 and 43 epochs, respectively. The horizontal positioning precision of PPP-RTK using the POLY-EV model is the highest, with a mean RMS of 1.59 cm.Cite this article as:Comparison of PPP-RTK performance under different regional ionospheric models
【2025】Aligning the Galileo code biases on the pilot and mixed signal channels to improve precise point positioning.
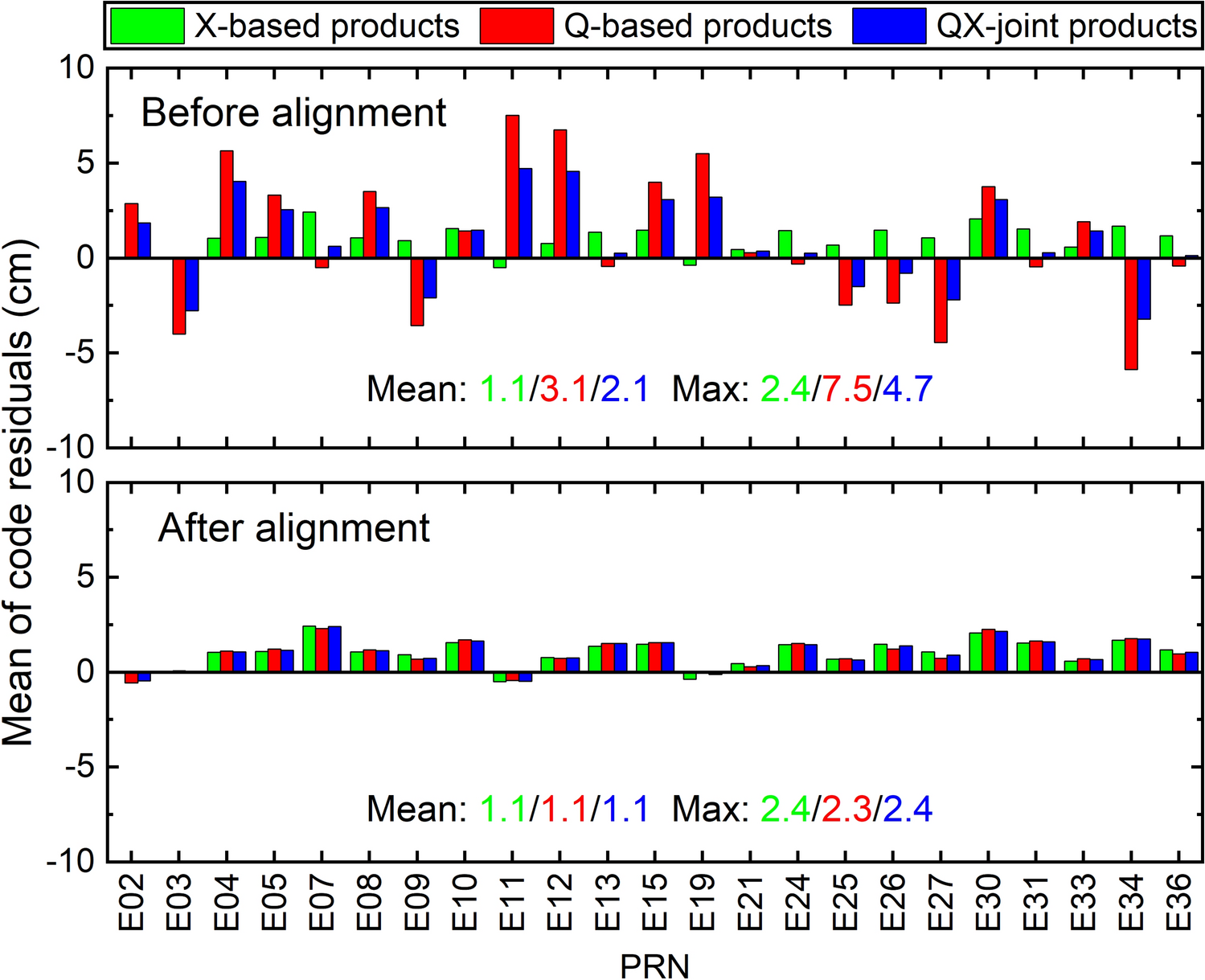
Galileo satellites modulate pseudorandom code series for both the pilot (Q) and mixed (X) channels, which however undergo separate demodulation processes by different GNSS receivers (e.g., Septentrio receivers accept the pilot channel only whereas Javad the mixed channel only). It is usually assumed that the Galileo code biases on both channels are close to each other, and then all Galileo stations can be safely used to estimate satellite clock offsets and code/phase biases, regardless of their demodulation channels. In this study, we aligned the code biases on the pilot and mixed channels by estimating intra-frequency differential code biases (DCB), and examined whether this alignment could improve the performance of precise point positioning (PPP). We performed a series of satellite clock offset estimations, phase bias estimations and PPP assessments for Galileo using data from 230 stations from days 300 to 365 in 2023. Our analysis uncovered that the ignored DCBs could introduce systematic biases of up to 0.1 m in satellite clock offsets and up to 0.49 cycles in satellite phase biases. Using the aligned code bias products, the unified satellite clock offsets and phase biases across pilot and mixed channels can be estimated. The differences of pilot and mixed satellite clock offsets were reduced to within 0.03 m, while the UPD differences were reduced to an average of 0.02 cycles. With these modified precise products, the static PPP-AR wide-lane ambiguity fixing rates increased from 79.28% to 96.81%, and the maximum code residuals decreased from up to 7.5 to 2.3 cm. The convergence time of the kinematic PPP-AR decreased by an average of 23%. Therefore, aligning the Galileo code biases on the pilot and mixed channel signals to generate unified precision products can improve the performance of PPP-AR.Cite this article as:Zhang, Q., Geng, J., Li, G. et al. Aligning the Galileo code biases on the pilot and mixed signal channels to improve precise point positioning. GPS Solut 29, 75 (2025). https://doi.org/10.1007/s10291-025-01838-4
【2025】GSeisRT: A Continental BDS/GNSS Point Positioning Engine for Wide-Area Seismic Monitoring in Real Time.
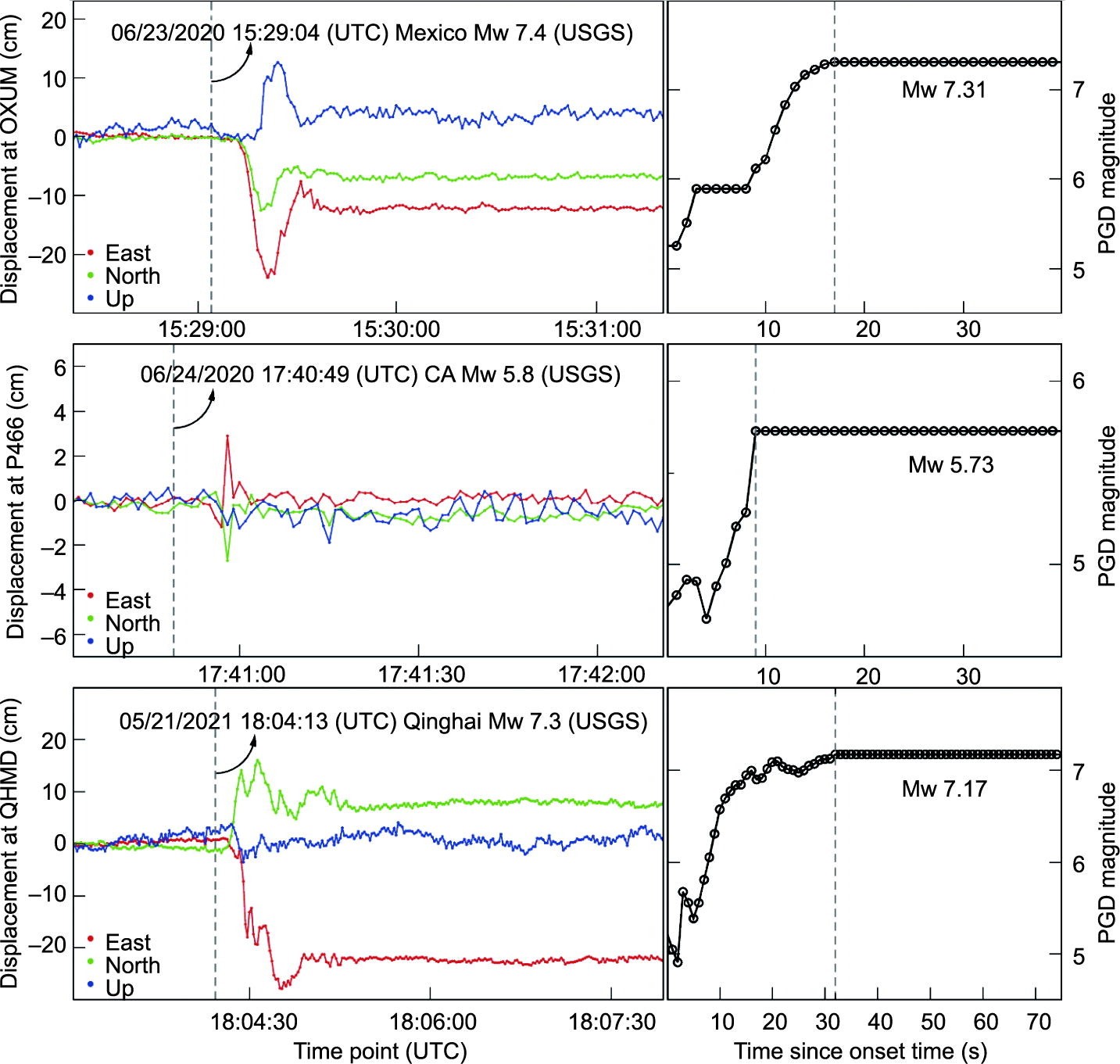
Precise coseismic displacements in earthquake/tsunamic early warning are necessary to characterize earthquakes in real time in order to enable decision-makers to issue alerts for public safety. Real-time global navigation satellite systems (GNSSs) have been a valuable tool in monitoring seismic motions, allowing permanent displacement computation to be unambiguously achieved. As a valuable tool presented to the seismic community, the GSeisRT software developed by Wuhan University (China) can realize multi-GNSS precise point positioning with ambiguity resolution (PPP-AR) and achieve centimeter-level to sub-centimeter-level precision in real time. While the stable maintenance of a global precise point positioning (PPP) service is challenging, this software is capable of estimating satellite clocks and phase biases in real time using a regional GNSS network. This capability makes GSeisRT especially suitable for proprietary GNSS networks and, more importantly, the highest possible positioning precision and reliability can be obtained. According to real-time results from the Network of the Americas, the mean root mean square (RMS) errors of kinematic PPP-AR over a 24 h span are as low as 1.2, 1.3, and 3.0 cm in the east, north, and up components, respectively. Within the few minutes that span a typical seismic event, a horizontal displacement precision of 4 mm can be achieved. The positioning precision of the GSeisRT regional PPP/PPP-AR is 30%–40% higher than that of the global PPP/PPP-AR. Since 2019, GSeisRT has successfully recorded the static, dynamic, and peak ground displacements for the 2020 Oaxaca, Mexico moment magnitude (Mw) 7.4 event; the 2020 Lone Pine, California Mw 5.8 event; and the 2021 Qinghai, China Mw 7.3 event in real time. The resulting immediate magnitude estimates have an error of around 0.1 only. The GSeisRT software is open to the scientific community and has been applied by the China Earthquake Networks Center, the EarthScope Consortium of the United States, the National Seismological Center of Chile, Institute of Geological and Nuclear Sciences Limited (GNS Science Te P Ao) of New Zealand, and the Geospatial Information Agency of Indonesia.Cite this article as:Jianghui Geng, Kunlun Zhang, Shaoming Xin, Jiang Guo, David Mencin, Tan Wang, Sebastian Riquelme, Elisabetta D'Anastasio, Muhammad Al Kautsar, GSeisRT: A Continental BDS/GNSS Point Positioning Engine for Wide-Area Seismic Monitoring in Real Time, Engineering, Volume 47, 2025, Pages 57-69, ISSN 2095-8099, https://doi.org/10.1016/j.eng.2024.03.012.

【2025】Factor Graph-Based Tightly Coupled RTK/INS/LiDAR System With De-Drifting LiDAR Data Association in Urban Areas.
Accurate, reliable, and continuous positioning is crucial for applications like autonomous driving and mobile robots. Integrating multiple sensors, such as the global navigation satellite system (GNSS), inertial navigation system (INS), and light detection and ranging (LiDAR), in a tightly coupled manner has become a promising solution to leverage their complementary advantages. However, LiDAR pose constraints may face significant inconsistencies with GNSS absolute measurements when using the frame-to-map data association method. Alternatively, frame-to-frame LiDAR data association suffers from limited accuracy due to sparse feature point matching. This article presents a tightly coupled GNSS real-time kinematic (RTK)/INS/LiDAR positioning system based on a de-drifting LiDAR data association method. The LiDAR keyframe selection strategy is designed by accounting for the availability and reliability of both GNSS and LiDAR data. A frame-to-last-GNSS-available-frame data association method is developed, utilizing both plane and edge features to construct LiDAR relative constraints. These measurements, alongside INS data and GNSS pseudorange and carrier phase measurements, are integrated within a factor graph optimization framework for pose estimation. Experimental results from an autonomous vehicle in urban environments demonstrate that the proposed tightly coupled system significantly outperforms other integration approaches using various sensor combinations, integration types, and LiDAR data association methods, improving 3-D positioning accuracy in root mean square (rms) from 12.40 m (using GNSS RTK) to 0.20 m. Moreover, the proposed method maintains high-accuracy absolute positioning with a 3-D position error of 0.28 m and a 3-D maximum error of 0.44 m during a 20-s GNSS outage.Cite this article as:C. Wang, P. Wang, F. Wang, W. Tang and J. Geng, "Factor Graph-Based Tightly Coupled RTK/INS/LiDAR System With De-Drifting LiDAR Data Association in Urban Areas," in IEEE Sensors Journal, vol. 25, no. 9, pp. 15442-15455, 1 May1, 2025, doi: 10.1109/JSEN.2025.3546627.
All Source Integrated Navigation
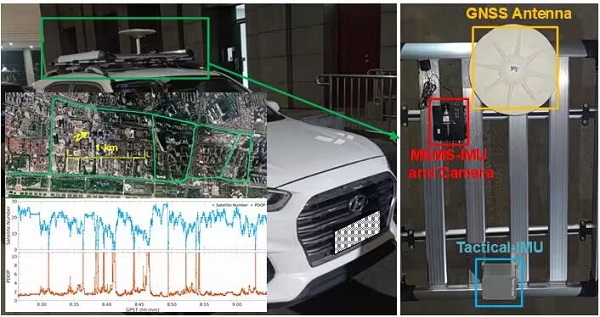
With the development of smart transportation, autonomous driving, mobile measurement and other fields, the demand for positioning and navigation is increasing for devices such as vehicles, drones and smartphones, and navigation application scenarios are becoming more and more complex, with higher requirements for positioning accuracy and reliability. In most scenarios, Global Navigation Satellite System (GNSS) can provide users with highly accurate and reliable location information. But in scenarios such as tunnels, tree-lined areas, urban canyons, indoor places and strong electromagnetic interference places, GNSS performance drops dramatically, even failing to provide or providing incorrect positioning information, making it difficult to adapt to the current complex and changeable location service scenarios. To obtain robust navigation performance, GNSS is often integrated with an Inertial Measurement Unit (IMU) to form a GNSS/INS integrated navigation system, which is used in navigation and positioning. In environments with poor GNSS observation, the performance of GNSS/INS integrated navigation system is closely related to the level of the IMU. The higher the IMU level, the higher the positioning accuracy and the cost of the system. Although Micro-Electro-Mechanical Systems (MEMS) IMU for the mass market can improve GNSS positioning performance to some extent, it still cannot provide reliable navigation and positioning information consistently.In addition to GNSS and IMU, there are still many sensors that can be used for navigation and positioning, such as LIDAR, cameras, magnetometers, barometers, etc. Therefore, in order to address the constraints of the inherent weaknesses of GNSS and provide reliable navigation information in GNSS-denied environment, in 2010, the US Defense Advanced Research Projects Agency (DARPA) proposed and conducted the research of All Source Position and Navigation (ASPN), that is, based on multi-source sensors, according to the changing mission requirements, fast system reconfiguration, online configuration and plug-and-play integrated navigation system are realized. The ASPN system, which includes GPS, IMU, camera, magnetometer, and barometer, was successfully developed by the US Air Force Research Laboratory in May 2017 and has been tested in multiple field experiments on air, sea and land platforms.The research on all source integrated navigation started late in China and is still in the exploration stage. Our team is working on all source navigation research. We have built an unmanned vehicle experimental platform containing sensors such as GNSS, IMU, monocular/binocular/fisheye cameras and LIDAR, designed and developed the software platform of GNSS/INS/Vision tight integrated positioning algorithm independently, and tested the hardware and software platform in the real environment of city blocks. In the subsequent research, we will integrate more sensors and further optimize the software platform to promote the development of all source integrated navigation in China.

PPP-AR and PPP-RTK
Precise Point Positioning (PPP) is a typical positioning technique based on GNSS pseudorange, carrier phase observations and precise satellite orbit and clock products. It has been widely used on geological researches and navigation applications by virtue of centimeter-level positioning accuracy without any reference stations. However, PPP has been constantly suffering from long convergence time of up to a few tens of minutes to get reliable centimeter-level positions owing to poor satellite geometry and pseudorange precision. This defect greatly hindered the further use of PPP on some real-time applications such as disaster early warning and autonomous driving. On the other hand, for geologists, PPP positioning precision is better to be as high as possible (millimeter-level) to reflect more geological signals. We have thus been dedicating to PPP rapid convergence and high-precision positioning since 2009 and focusing on two aspects.1. PPP-ARGNSS Carrier-phase measurements typically have very low noise (millimeter-level) compared to pseudorange counterparts (decimeter-level), while they have any number of integer cycles. If the value of integer ambiguities were obtained exactly, unambiguous carrier phase observables would be recovered and enable a reliable centimeter-level positioning without any seconds of convergence time. Ambiguity Resolution (AR) is thus a breakthrough of the slow convergence of PPP. Since PPP-AR was firstly proposed by Ge in 2008, we had carried out some innovative and effective researches towards rapid PPP-AR. We demonstrated the equivalence relation of ambiguity resolution with fractional-cycle biases (FCB) and integer-recovery clocks (IRC) in 2010; in 2012, we proposed the improved narrow-lane FCBs derived from an ambiguity-fixed GPS network solution for a high-precision FCB estimation; we proposed a triple-frequency PPP-AR approach for the rapid convergence in 2013; we achieved the estimation of GLONASS phase biases across inhomogeneous receivers in 2016; we also enabled inter-system ambiguity resolution among GPS and BeiDou for a better ambiguity resolution performance in 2018; we proposed an global instant decimeter-level positioning approach called PPP-WAR in 2019, aiming at time- and safe-critical navigation applications. Now we are chasing for the reduction of PPP-AR convergence time and improvement of positioning accuracy using multi-GNSS and multi-frequency data.2. PPP-RTKInteger ambiguity resolution at a single station can be achieved by introducing predetermined phase biases into the float ambiguity estimates of PPP. This integer resolution technique has the potential of leading to a PPP-RTK (Real-Time Kinematic) model where PPP provides rapid convergence (a few seconds) to a reliable centimeter-level positioning accuracy based on an RTK reference network. Using the precise ionosphere delay information estimated from a local reference network, real-time PPP is able to resolve undifferenced ambiguities successfully in several seconds. So PPP-RTK is another potential technique to extend PPP application scenarios. We had firstly applied the local ionosphere delay corrections on PPP for the rapid re-convergences to ambiguity-fixed solutions in 2010, after which we proposed a PPP-RTK model for the rapid ambiguity resolution in 2011. In 2017, we performed GPS and GLONASS ambiguity resolution simultaneously by introducing ionosphere corrections estimated from a dense reference network and demonstrated that real-time PPP solutions could be initialized successfully within 5 min. We will still take efforts on regionally augmented PPP to meet the requirement of real-time GNSS positioning applications.Related works1. Integer ambiguity resolution in precise point positioning: Method comparison. J. Geod (2010)2. Rapid re-convergences to ambiguity-fixed solutions in precise point positioning. J. Geod (2010)3. Improving the estimation of fractional-cycle biases for ambiguity resolution in precise point positioning. J. Geod (2012)4. Triple-frequency GPS precise point positioning with rapid ambiguity resolution. J. Geod (2013)5. GLONASS fractional-cycle bias estimation across inhomogeneous receivers for PPP ambiguity resolution. J. Geod (2016)6. Rapid initialization of real-time PPP by resolving undifferenced GPS and GLONASS ambiguities simultaneously. J. Geod (2017)7. Inter-system PPP ambiguity resolution between GPS and BeiDou for rapid initialization. J. Geod (2018)8. Toward global instantaneous decimeter-level positioning using tightly coupled multi-constellation and multi-frequency GNSS. J. Geod (2019)

Android high-precision GNSS
The decreasing size and shrinking cost of GNSS (Global Navigation Satellite System) chipsets have been facilitating their embedment into devices such as smartphones, wearables, shared bicycles, and vehicles. However, mass-market chipsets can only achieve 2-3 m positioning accuracy, which can degrade to 10 m or worse in case of adverse multipath conditions. With the release of Android 7 in 2016, Google announced that the raw GNSS measurements in Android smart devices could be exported and used through the API (Application Programming Interface) at the application level. That has been catalyzing the innovation of high-precision positioning using the democratized low-cost handset for mass-market applications. In particular, mobile- and safety-related applications, e.g., multimodal logistics and mobile health diagnosis, can potentially benefit from sub-meter or better positioning precisions, while a sub-decimeter or centimeter precision available at smartphones may facilitate semi-professional tasks such as personal or crowd-sourced mapping.With this opportunity, in 2018, we comprehensively evaluated the signal characteristics and positioning performance of the raw multi-GNSS measurements of Nexus 9, Huawei Honor V8 and Samsung S8, and successfully connected the external antenna to these smart devices. In 2019, we found two unique error characteristics of the available Nexus 9 carrier phase: anomalous "jagged" distribution and random initial phase bias, and provided the thermal noise model parameters of code tracking loop (DLL) and phase tracking loop (PLL) for different smart devices. In the same year, we proposed an improved hatch filter algorithm towards sub-meter positioning using only Android raw GNSS measurements without external augmentation corrections. Subsequently, we developed an application named "Pride-Location App" based on the raw GNSS observations of Android smartphones and the ultra-fast orbit and clock products provided by IGMAS Analysis Center. This application has a series function, such as recording the raw GNSS observations of Android smartphones, displaying the precise position on the map and logging the ultra-fast ephemeris products after interpolation. In the following research, we will further discuss and study the feasibility of resolving Android GNSS carrier-phase ambiguities.Related Works1.Characteristics of raw multi-GNSS measurement error from Google Android smart devices. GPS Solutions (2019)2.An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sensing (2019)3.A Comprehensive Assessment of Raw Multi-GNSS Measurements from Mainstream Portable Smart Devices. ION GNSS+ (2018)

Seismogeodesy
Traditionally, seismic and geodetic networks are two independent networks used for the observation of earthquakes at regional distances. They are seldom collocated due to the lack of knowledge about multi-sensor fusion at the very beginning. Gradually, geoscientists come to realize that the range of seismic motions is broad and no sensor can capture all signals of interest to seismology and earthquake engineering.Strong motions and seismometers are precise enough in recording high-frequency seismic signals but for low-frequency part they have relatively low precision. Computation of broadband displacements from inertial sensors is fraught with many known problems and has no recognized single solution. For example, unresolved rotational motions is a major impediment in retrieving precise displacements for that small offsets in the acceleration time series would produce linear and quadratic errors in integration process. Consequently displacement waveforms would grow unbounded as time progresses. A traditional approach to suppress the divergence is applying high-pass filter on acceleration time series but at the cost of loss of permanent displacements.GNSS technique can directly capture ground motions in displacement forms and an emerging field named GNSS seismology has been catching geoscientists’ attention. The advantage of GNSS technique is that it can recover permanent co-seismic displacements and is free of clipping in large earthquakes. Nevertheless, it has larger noises than inertial sensors in the full spectrum band. This leads to inaccurate signals in high-frequency band and also for small earthquakes.So it is not surprising that some scholars advocate combining seismic and geodetic data to get optimal broadband displacements because they are complementary in the sense that one’s weakness can be complemented by another strengths. Following this viewpoint, we also made a number of impressive advanced works. In 2013, we proposed a tightly coupled Kalman filter approach to estimate seismogeodetic displacements and velocities from GPS phase and pseudorange observations and collocated seismic accelerations in a PPP-AR process and can be used in early warning systems; in the same year, we also proposed a method on how to recover coseismic point ground tilts from collocated high-rate GPS and accelerometers. In 2017 and 2018, we proposed integrating GPS with GLONASS for highrate seismogeodesy and high-rate multi-GNSS for subdaily crustal deformation monitoring respectively which present the role of multi-GNSS in seismogeodesy to us. In 2019, we further developed the multi-sensor fusion method by adding gyroscope data in the combination of collocated high-rate GNSS and accelerometers to correct accelerometer measurements.Related works1. Six‐Degree‐of‐Freedom Broadband Seismogeodesy by Combining Collocated High‐Rate GNSS, Accelerometers, and Gyroscopes. Geophysical Research Letters (2019)2. Noise characteristics of high-rate multi-GNSS for subdaily crustal deformation monitoring. Journal of Geophysical Research (2018)3. Integrating GPS with GLONASS for highrate seismogeodesy. Geophysical Research Letters (2017)4. Recovering coseismic point ground tilts from collocated high-rate GPS and accelerometers. Geophysical Research Letters (2013)5. A new seismogeodetic approach applied to GPS and accelerometer observations of the 2012 Brawley seismic swarms: Implications for earthquake early warning. Geochemistry, Geophysics, Geosystems (2013)





